“協働ロボット(UNIVERSALROBOTS)による多品種生産への対応”
みなさんこんにちは。もりぶろ!です。
今回はROBOT TECHNOLOGY JAPAN 2024 森哲ブースの展示内容についてご紹介します!
私たちのテーマは「協働ロボット(UNIVERSALROBOTS)による多品種生産への対応」です。
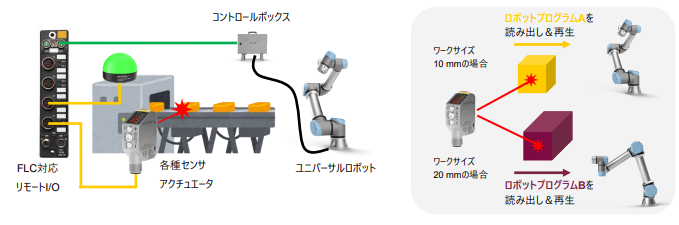
一言でいうと、高さの異なる3つのワークを1つのセンサーで識別し、それぞれのワークに応じて異なるロボットプログラムを読み出すというデモンストレーションです。
何がすごいのIOLINK?➀
➀たとえばまったく同じデモンストレーションをデジタルセンサーで行う場合、段取り替えのたびに、デジタルセンサーの高さを調整する必要がありますが、
⇒IOLINKなら変異データを読み取れるので、センサー高さを変更したりという手間が、PC操作で可能になります。
➁またまったく同じデモンストレーションを光電センサーで行う場合には、3対のセンサーを取り付ける必要がありますが、
⇒IOLINKなら変異データを読み取れるので、複数のセンサーの管理や配線接続の手間から解放されます。
➂もっと言えば、センサーが壊れた際にも、エラー情報をPC上で受け取ることができるようになります。(今回のデモンストレーションとは無関係です。すいません!)
何がすごいのIOLINK?➁
➃実はこれが今回の目玉なのですが、この展示パッケージ!なんと!ロボットプログラムを読み出すのに、PLCやロボットコントローラーを使用しておりません。
通常UNIVERSALROBOTSであれば、センサーやコンベヤはロボットコントローラーに接続して制御します。あるいはPLCに接続して制御するのが普通かと思います。
ところがTURCK社のリモートI/OにはARGEEなるプログラムソフトが無償提供されており、これにより今回の展示パッケージでは、PLCもロボットコントローラーも使用せずに、リモートI/Oがプログラムの読み出しを行っています。
ロボットコントローラーをお手持ちのPCと考えて頂くとわかりやすいのですが、センサーもコンベヤもロボットプログラムも、と常に容量いっぱいで動き続けているとロボットコントローラーも容量オーバーでフリーズという事態が起きてしまいます。
→今回の展示では、リモートIO自体がロボットの既定プログラムを呼び出すことで、ロボットコントローラーの負担を軽減するというご提案内容にもなっています。
以上、詳しい内容は展示ブースでお待ちしております!